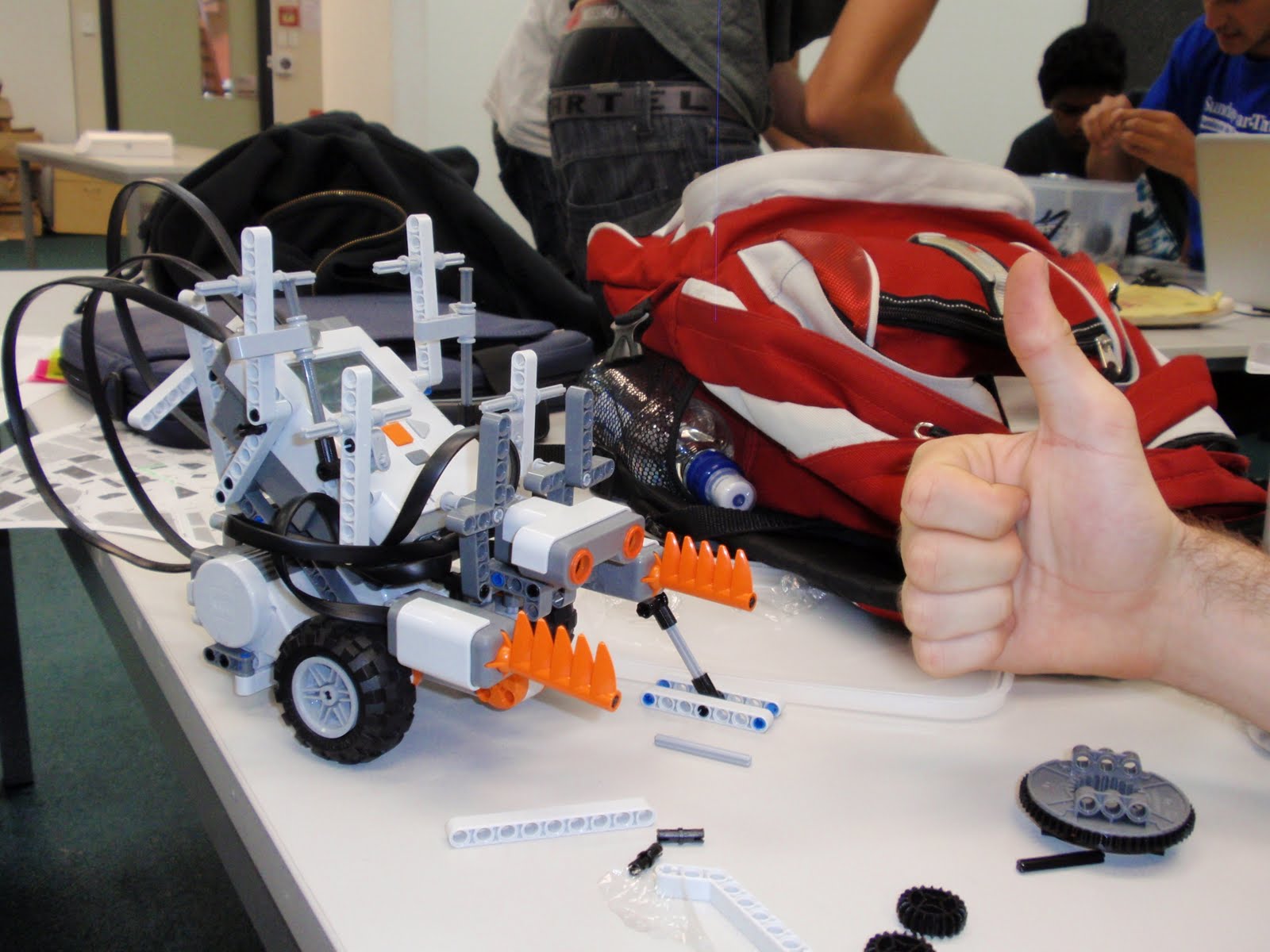
It was the morning of the robot race. That's our final robot up there. :) Anyway, we got to see whether it moved the way we wanted to with fully charged batteries this time. NAH!! It didn't move how I wanted it to at all XD It goes in a straight line for ages, then does this random spin I put in, looking very confused and lost. Then eventually it wanders off under the tables far far away. The straight line movement was its protocol as the Atlas chess piece while the spinning was to show its wall of protection. I think it would have been better if we put a little more complex programming in it so that it could use its sensors properly. Couldn't put any sensor commands in there because at the time nobody knew how to yet. That's part of the whole project though. It's ok if things don't work out as long as you remember why. Another thing is learning how to pick up things quickly through experimentation, or not knowing something, remembering what you don't know and try to find out how later. This course is not for the lazy.

Later we set all the robots off at the same time. What you get is a pile of dead robots. I quite enjoyed watching that. The Rogue and the Grim Reaper were the best at shredding up and tipping over other robots.

However, today, my favourite had to be the Manic. Look at its evil face after tipping over another robot!
No comments:
Post a Comment